MyRobotPro – An offline programming robot simulation software for varied robotics.
It’s a process-focused robot simulation software allows users to program and simulate a robotic workcell in 3D without the physical need of a prototype workcell setup under interactive simulation and editing environments.
Display & audio port: 2 × micro-HDMI 2.0, 3.5 mm analogue audio-video jack
USB: 2x USB 3.0 + 2x USB 2.0
Network: Native Gigabit Ethernet
Expansion: 40-pin GPIO header
Storage: 32G microSD card
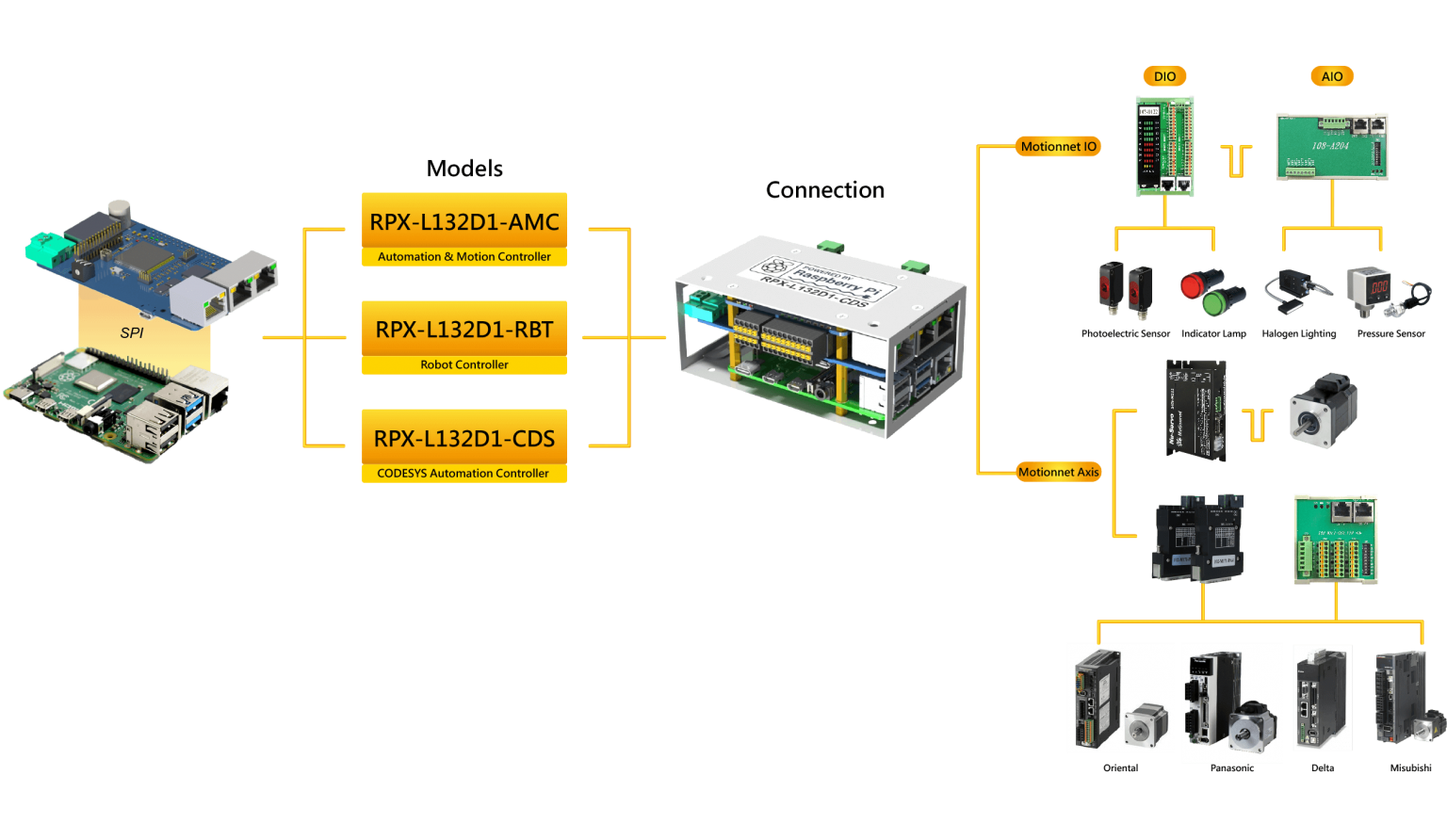
HAT-L132D1
Motionnet: 2-Ring
Ring0: for DIO slave, Max:16 pcs
Ring1: for Motion slave, Max: 6
Encoder interface: EA/EB; 2 channels
CMP: 8 channel (Fixed interval or Table(max. 1024 pt.))
DI: 4 (also available for latch function)
DO: 4 ( 200mA output)
Hardware IC: unique ID
Power supply: DC24V at 220mA
Software:
Support MyRobotPro Editor
MyRobotPro – An offline programming robot simulation software for varied robotics.
It’s a process-focused robot simulation software allows users to program and simulate a robotic workcell in 3D without the physical need of a prototype workcell setup under interactive simulation and editing environments.
Support 6-Axis Robot and Delta Robot
Support OPC UA
Using OPCUA as a reliable exchange of data collector in the industrial automation field.
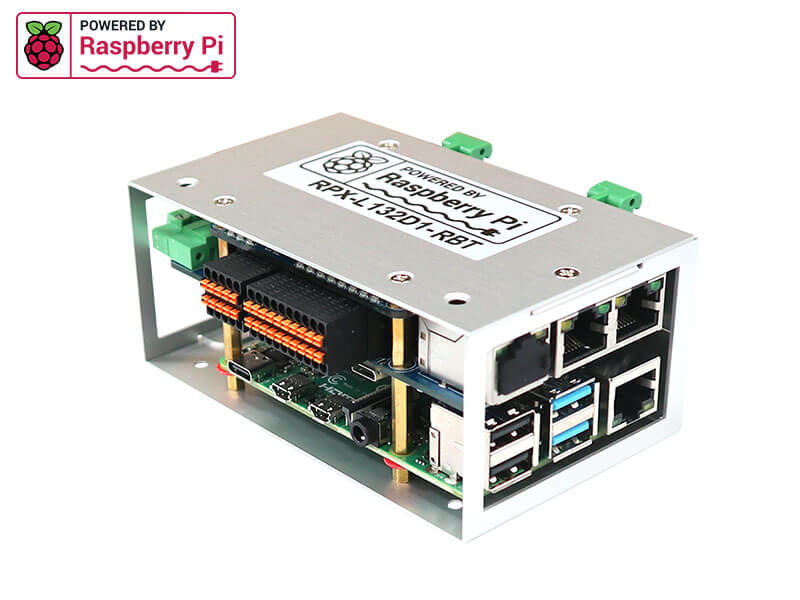
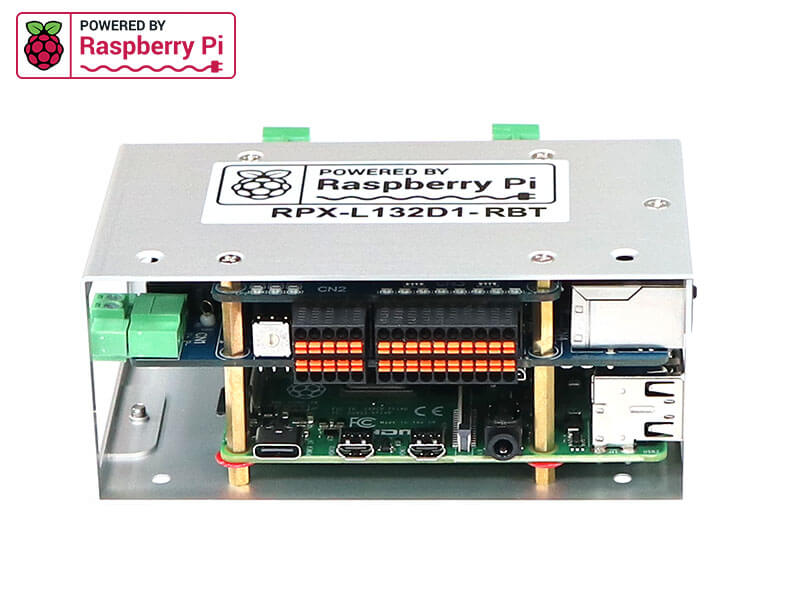
Specification:
Raspberry Pi 4 Model B
SoC
Broadcom BCM2711
Quad coreCortex-A72 (ARM v8) 64-bit SoC @ 1.5GHz
GPU
Broadcom VideoCore VI
RAM
4 GB LPDDR4 SDRAM
Display & audio port
2 × micro-HDMI 2.0, 3.5 mm analogue audio-video jack
USB
2x USB 3.0 + 2x USB 2.0
Network
Native Gigabit Ethernet
Expansion
40-pin GPIO header
Storage
32G microSD card
Power Supply
Raspberry Pi 15W USB-C Power Supply
(96-264Vac operating input range)
HAT-L132 Motionnet
Max. Rings
2
Max. Slaves
Ring 0 for DIO, Max. 16 slaves
Ring 1 for Motion, Max. 16 axes
HAT-L132 Advanced I/O
Isolated DIO
4 DI, also available for latch function.
4 DO 200mA output
Encoder Input
EA/EB, 2 channels
Compare Trigger
8 channels, Fixed interval or variable interval (max. 1024 pt.)
HAT-L132 Power
Power Supply
DC24V at 220mA
Power Connector
2-pin Terminal Block
HAT-L132 Environment
Dimension
L113 x W48 x H93 mm (RPX-L132 with chassis)
Operation Temperature
0°C~50°C (32°F~122°F) ambient temperature with air flow